Traktorinkuljettaja matkustajaksi?
Traktoritöiden alkutaipaleella kyntäminen tai muokkaaminen saattoi olla jopa vaarallista huolimattomalle ohjaajalle. Jos traktorin etupyörä sattui huonossa kulmassa kyntövakoon, saattoi se ja samalla ohjauspyörä kääntyä voimakkaasti ja kuljettajan sormet olivat vaarassa. Tämän päivän teknologia mahdollistaa sen, että itse työ pellolla, mutta myös päisteessä kääntyminen tapahtuvat täysin automaattiohjauksen varassa. Jopa työtapahtuman säädöt voivat olla automaattisia.
Päisteajo-ohjelmat
Jo vuosikausia on traktoreihin ollut saatavissa eritasoisia ohjelmoitavia päisteajoapuja. Näin osa kääntymiseen liittyvistä toiminnoista tapahtuu automaattisesti. Autonomiset toiminnot käynnistää joko aika, ajettu matka tai kuljettajan painama nappikäynnistys. Automaattiohjelmiin voidaan tallentaa tietyt käskyt valikosta säätämällä tai nauhoitusperiaatteella. Esimerkiksi kyntötyössä kuljettajan toimet päisteessä kääntymisen yhteydessä ovat: vapautetaan tasauspyörästön lukko, vakionopeussäädin kytketään pois päältä, vaihdetaan vaihdetta, nostetaan aurat ja käännetään ne paluuajoa varten, ohjataan traktorin käännöksessä. Lisäksi kääntymisen jälkeen edellä luetellut toiminnot palautetaan jälleen kyntöön sopiviksi seuraavaa ajoa varten kun. Näistä vain ohjaus jää kuljettajan huoleksi, jos käytössä on kehittynyt päisteajoautomatiikka.
Edellä luetellussa tapauksessa yhdessä kääntymisessä voi olla kahdeksan automaattista toimintoa, ja yhden hehtaarin kyntötyössä niitä kertyy auran ja lohkon koosta riippuen helposti 50 – 150, joskus enemmänkin. Työpäivässä kuljettaja välttyy automatiikan ansiosta jopa yli tuhannesta säätötoimesta.
Automaattiohjaus
Traktoreihin on saanut jo vuosia automaattiohjauksen, joko tehdasasenteisena tai jälkiasenteisena. Toiminta perustuu satelliittipaikannukseen ja ohjaushydrauliikan ohjaamiseen ohjausyksikön käskyjen mukaan. Perusversioissa ajolinjojen tarkkuus on jopa puolen metrin luokkaa, mutta ostettavilla korjaussignaaleilla päästään 2-10 cm ajotarkkuuteen signaalista (maksettavasta hinnasta) riippuen. Toiminto saadaan päälle, kun nauhoitetaan ensimmäinen ajo pellon reunassa ja kerrotaan työvälineen työleveys. Tämän jälkeen näyttö (Kuva 1.) opastaa seuraavalle ajokaistalle, ja näytöltä näkee myös maalauksena käsitellyn alan. Automaattiohjaus pystyy sekä suoraviivaiseen ajoon, että myös toistamaan kaarevat ja mutkaiset ajolinjat. Teknisesti olisi myös mahdollista, ja kokeiluja on ollutkin, yhdistää automaattiohjaus ja päisteajoautomatiikka, mutta tietyt turvallisuuteen ja vastuihin liittyvät seikat ovat toistaiseksi estänet kaupalliset ratkaisut.

Kuva 1. Kosketusperiaatteella toimiva näyttö (terminaali) maalaa ruiskutusjälkeä. Tällainen näyttö voi olla kiinteä osa traktoria tai usein myös työkoneen mukana tuleva, kuten kuvassa oleva. (Kuva: Amazone nettisivut.)
Automaattinen määränsäätö vapauttaa kuljettajan säätötoimista
Traktorin perään asetettu työkone pyritään säätämään optimaalisesti työhönsä. Maan ominaisuudet (maalaji, kosteus, ravinteisuus) ja sitä mukaa sopivat kylvö-, lannoitus- tai ruiskutusmäärät vaihtelevat kuitenkin paikkakohtaisesti ja tätä vaihtelua vakioarvosäätö ei ota huomioon. Seurauksena on paikkakohtaisesti epäsopivia annoksia tai käsittelyjä. Viitseliäs viljelijä on voinut traktorin ajonopeutta säätämällä (pikavaihteella) vaikuttaa esimerkiksi pinta-alayksikölle tulevaan lanta- tai kasvinsuojeluainemäärään. Tällöin kuitenkin säädön peruste on muistinvarainen tai näköhavaintoon perustuva. Tällaisessa tilanteessa saattaisi tulla kymmeniä tai jopa lähemmäs sata säätötointa hehtaarille ja työpäivässä satoja.
Edellä kuvatun tilanteen säätötoimet voidaan jättää automatiikan hoidettavaksi. Tällöin toki tarvitaan etukäteistyötä, sillä jollain periaatteella täytyy selvittää annosmäärien tai käsittelyjen paikkakohtaiset tarpeet. Näistä tarpeista muodostetaan sähköinen tehtäväkartta, joka syötetään traktorin järjestelmään joko muistitikulla tai pilvipalvelujärjestelmien välityksellä. Traktorissa oleva ohjaustietokone ohjaa pellolla paikannusjärjestelmän avulla paikkakohtaisesti tarvittavan annoksen tai käsittelyn.
Automaattisäädön toimintaperiaate
Automaattiseen määrän säätöön tarvitaan paikannusjärjestelmä, ohjaustietokone, näyttö, informaatiota kuljettavat väylät, toimilaite varsinaiseen säätöön ja ohjaustiedon käsittävä tehtäväkartta. Kuvassa 2 näkyvät nämä keskeiset toiminnalliset osat ja niiden kytkentäperiaate. Kaiken toiminnan perusta on standardin mukainen ISOBUS- väylä, jota pitkin liikkuu useita anturitietoja, kaikki säätötiedot ja paikannustieto. Tieto liikkuu väylässä osoitteella varustettuna, ja vain oikealla osoitteella oleva tieto päätyy käyttöön haluttuihin kohteisiin.

Kuva 2. ISOBUS- laitteiston periaatekuva. Yksi traktorin tietokoneista (T-ECU) taltioi mm. moottorin pyörimisnopeuden, paikannustieto saadaan GPS- paikantimelta, ISOBUS tehtävänohjain (TC) ohjaa varsinaista säätötointa siihen tuodun tehtäväkartan pohjalta, virtuaaliterminaali (VT) on traktorissa oleva tai traktorin ISOBUS- väylään erikseen liitettävä ISOBUS- laitteiden käyttöliittymä. Virtuaaliterminaali lukee ja näyttää työkoneen tietokoneen (IMP-ECU) lähettämät tiedot työkoneesta, sen toimintaperiaatteista, asetusarvioista ja säätöominaisuuksista. (Kuva: Esala 2018.)
Esimerkki toimivasta järjestelmästä
Kasvinsuojeluruiskun määränsäätöautomaatti perustuu ruiskutusnesteen virtauksen mittaukseen. Anturissa on virtausnopeuteen verrannollisella nopeudella pyörivä elementti, jonka nopeustieto välitetään ohjaustietokoneelle. Virtausmittarin lisäksi tarvitaan nopeus/matkasignaali joka kuvan tapauksessa saadaan joko taka-akselin päällä olevasta takapyörän pyörimistä seuraavasta anturista tai GPS- paikantimelta. Jälkimmäinen tarvitaan paikkakohtaisessa ruiskutuksessa. Säätötapahtumassa sähkömoottorilla käytettävä paineensäädin säätää paineen sellaiseksi, että saavutetaan tavoiteltu nestemäärä pinta-alayksikköä kohti. Lisäksi ruiskun toiminta voidaan käynnistää tai sulkea 3 m lohko kerrallaan tai nykyään jopa suutin kerrallaan (0.5 m kaista).
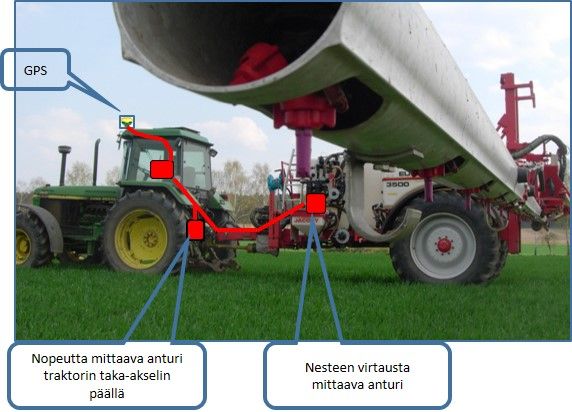
Kuva 3. Vanhempaan traktoriin kytketty määränsäädöllä varustettu kasvinsuojeluruisku. Tässä traktorissa ei ole ISOBUS- väylää, mutta kasvinsuojeluruikun järjestelmän ja kytketyn paikannusanturin avulla paikkakohtainen ruiskutus onnistuu. (Kuva: Esala 2019.)
Kuljettaja ei sittenkään vielä matkustaja
Kuljettaja tarvitaan ainakin toistaiseksi aloittamaan ja lopettamaan lohkolla tapahtuvan työn, sekä tietenkin kuljettamaan traktori työkoneineen lohkolle. Myös päistekäännöksissä kuljettaja on pelissä mukana kääntämässä ohjauspyörää. Työn valvonta, esteiden kiertäminen ja yllättäviin tilanteisiin puuttuminen jää myös kuljettajalle. Mutta tämä kaikki on teknisesti hoidettavissa myös automaattisesti, jopa niin, että kuljettajaa saatikka ohjaamoa olisi ollenkaan. Tästä on näyttöäkin. Luken tutkijat tekivät jo kymmenkunta vuotta sitten automaattisesti viljaa kylvävän yksikön jossa ei ollut ohjaamoa ollenkaan. Ja englannissa Harber Adams yliopistossa leikkuupuimuri (Suomalainen Sampo Rosenlew) pui viljaa lohkolta perävaunuun säiliön tyhjäten täysin automaattisesti. Tämä on se tulevaisuus, mihin mennään.
Jussi Esala, agroteknologian yliopettaja
SeAMK Ruoka